从产业链多维度对自动驾驶的深度思考
发布时间:2019-08-22 15:39:55
2019年8月,由交大安泰MBA校友会汽车行业专业委员会举办的“自动驾驶技术趋势分享会”顺利完成。本次活动旨在让广大校友以及业内人士能够对汽车自动驾驶有更为清晰的理解和认知,以下是全文报告。
2019年8月,由交大安泰MBA校友会汽车行业专业委员会举办的“自动驾驶技术趋势分享会”顺利完成。本次活动旨在让广大校友以及业内人士能够对汽车自动驾驶有更为清晰的理解和认知,以下是全文报告。
第一位分享嘉宾,来自华东某知名自主整车厂的智驾系统经理:王林先生,从整车厂角度给我们做了相关分享。
首先,王经理认为传统汽车的发展主要分为自动化和网联化,最终会朝着智能网联相结合的方向发展。自动化,顾名思义,是由车代替人来完成一系列动作。网联化,是指车辆可以借助于网络与其他车辆或者基础设施进行信息的交互,在这过程中可以产生额外的价值和服务。由于受到技术及基础设施的限制,现阶段量产车的研发主要还是以自动化为主,而网联、5G、V2X的大规模量产还需要一定的时间。
其次,就自动驾驶的分级,王经理展开了详细的介绍,并指出当前量产车的自动驾驶还是处于Level 2阶段,想要达到Level 3还需要整个行业多年的努力。
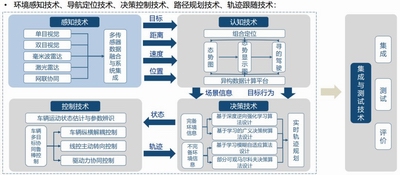
然后,王经理介绍了自动驾驶的原理,包括系统架构,关键技术和零部件,以及主流的自动驾驶发展思路:以整车厂为代表的基于驾驶辅助系统开发经验,通过传感器及算法叠加,逐步实现L3+智能驾驶系统;以互联网企业为代表的以Lidar技术为主,并采用集成式系统架构,将L3+自动驾驶技术研发作为切入点;以新兴企业为代表的以低成本传感器为基础,实现特定环境的自动驾驶功能尽早完成商业化模式或以人工智能技术为基础,以迅速积累智能驾驶系统研发技术,来达到弯道超车的目的。
最后,王经理指出了自动驾驶目前面临的技术和社会难题,如在以下条件下的自动驾驶:极端恶劣天气、强光或阴暗条件、未知道路或道路有物理缺陷、复杂的社会关系或伦理道德等。同时,也谈了谈他认为接下来自动驾驶技术的增长点:传感器融合方案、深度学习、低成本小型化激光雷达、无人驾驶时代的出行方案。
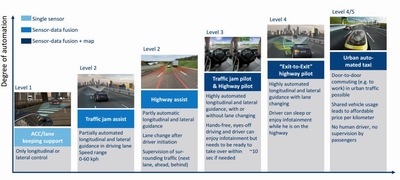
第二位分享嘉宾,来自博世工程技术的项目经理:徐梦慈女士,给我们分享了领先Tier1在自动驾驶领域的一些发展方向。梦慈提及未来汽车的主要趋势分为自动化、网联化、电气化。就自动化来说,Bosch自动驾驶的解决方案主要围绕自动出行和自动泊车。自动驾驶的优势:有助于提升行车安全。来自博世内部的一份统计数据表明,1999年汽车安装ESP和ABS之前,90%的汽车交通事故源于驾驶员自身的问题,自1999年汽车安装ABS和ESP以后,截止2013年,汽车事故率下降了60%。1. 可靠的传感器数据输入:通过不同传感器的组合实现360°环绕感测,可以帮助汽车判断下一步的动作;2. 功能安全和信息安全:分别用来应对车辆电子系统的失效以及黑客的攻击;3. 全球化标准的法律法规:能够清晰的定义或者判定自动驾驶事故的责任;4. 系统架构:需要考虑到传感器、ECU、执行器的冗余,用来应对故障的发生;1. ACC/lane keeping support (Level 1):横向或纵向的驾驶辅助,如ACC自适应巡航,或者车道保持功能;2. Traffic jam assist (Level 2):60km/h以内,部分横向和纵向结合的驾驶辅助;3. Highway assist (Level 2):在驾驶员的确定下可以超车;4. Traffic jam pilot & Highway pilot (Level 3):高度的自动驾驶,但是在车辆出现故障时候,驾驶员需要接管车辆;5. “Exit-to-Exit” highway pilot (Level 4):指定路线的高级自动驾驶,乘客无需操作;6. Urban automated taxi (Level 4/5):无人驾驶。
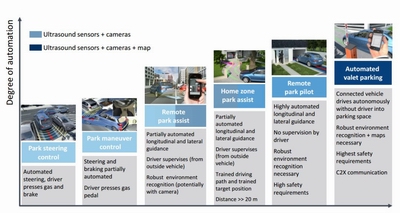
1. Park steering control:车辆负责自动转向,驾驶员负责踩油门和制动踏板;2. Park maneuver control:车辆负责自动转向和制动,驾驶员负责踩油门踏板;3. Remote park assist:远程泊车,驾驶员不需要在车里;4. Home zone park assist:对于固定线路的车位,车辆自动驶回并停好;5. Remote park pilot:车辆自动找车位,无需驾驶员,但是需要驾驶员在旁监控;6. Automated valet parking:车辆自动找车位,同时无需驾驶员在旁监控。
第三位分享嘉宾,来自地平线的商务战略总监:吴石庐先生,给我们带来了从芯片角度如何支撑自动驾驶的分享。在芯片方面,地平线侧重于驾驶类、非驾驶类AIoT(人工智能物联网)的芯片,更多的是用于边缘计算。汽车行业正处在快速变革期,自动驾驶是最具颠覆性的因素,除了可以减少交通事故之外,它将重塑产业格局,也将激发共享出行的潜力。
自动驾驶汽车所需要的软件代码量呈爆炸式增长,远超IT史上任何一个产品。汽车ECU数量迅速增加。从分布式、有限的ECU,到ECU不断的增加。在此过程中带来的问题:ECU性能的瓶颈以及软件开发的低效。面临的挑战:越来越多的传感器之间的同步及功能协同问题。业内目前的主要解决方案是开发域控制器,其优势主要为:系统功能集成度提高、数据交互的接口标准化/网络化、降低成本,提升效率。
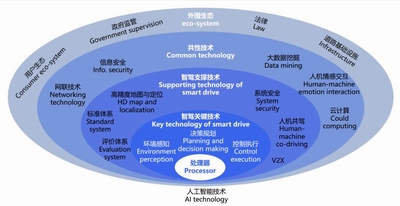
汽车电子软件的开发与发布模式:从封闭式开发走向生态协同进化,与移动设备App有高度类同,通过虚拟化的中间层将软件与硬件分离,并不断的迭代更新软件实现功能的增加。而在整个技术生态中,人工智能处理器(AI芯片)是最核心的部分。
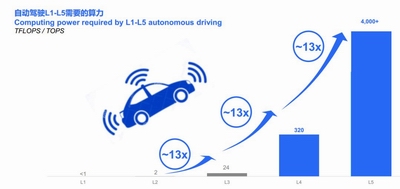
随着自动驾驶等级的提升,芯片所需的算力呈指数型提升。在目前行业的规划里,从算力、功能安全角度来看是可以满足未来自动驾驶的算力需求的。自动驾驶系统会基于摄像头、毫米波雷达、激光雷达等传感器采集的感知数据去做融合,并结合地图对环境去做完整的建模,从而能够实现驾驶过程中的预测和决策。随着5G牌照的发放,未来5G在车辆端开始应用时,MEC(多接入边缘计算)成为必由之路。AI物联网的核心难题:每辆自动驾驶车辆每天产生600-1,000 TB数据,2,000+辆自动驾驶车辆每天产生的数据量是250万兆Bytes,相当于人类在2015年产生的数据量。这么多的数据,通过MEC可以提前做预处理和筛选后再上传到云端,从而解决上述问题。工业时代可以通过“用电量”侧面反映工业的发展情况,数字经济时代可以通过“用云量”侧面反映经济发展情况,在AI经济时代可以通过“算力”来侧面反映其发展情况。有效算力的核心指标:算力利用率,能源转化为计算的效率,计算的成本,算力转化为AI输出的效率。
第四位分享嘉宾,来自Arm中国的汽车市场高级经理:舒杰博士,给我们带来了芯片技术方面的分享。Arm是一个IP(Intellectual Property)供应商,即:他们设计芯片,但是不生产芯片,转而以授权的方式将芯片设计方案出售给其他公司。Arm是从1996年开始进入汽车领域的,到目前为止有超过85%的车载信息娱乐系统(IVI)相关的应用处理器使用的是Arm的架构,有超过65%的自动驾驶相关的应用处理器使用的是Arm的架构,同时,Arm也会涵盖动力系统、车身、智能座舱、网联等处理器。
未来车辆的电子系统会越来越复杂,其成本占整车的比重也会越来越大。其中,信息娱乐系统、新能源电控系统、自动驾驶相关控制器的成本占比会越来越高。
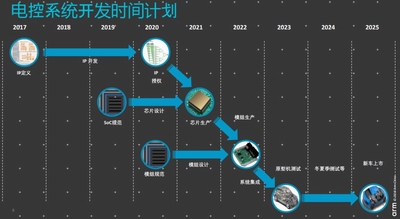
按传统的周期:一款车用芯片从IP定义与研发、芯片设计与验证、芯片生产再到供应商的模组生产、原型机测试、整车量产,总体时间大约需要8年;芯片架构设计难点:芯片可量产并不一定代表能收回成本,只有批量生产达到一定规模以后才能收回成本。就自动驾驶这个领域,由于一开始还没有上规模,汽车芯片的新玩家很可能需要持续投入8年以上甚至将近10年才能收回成本。
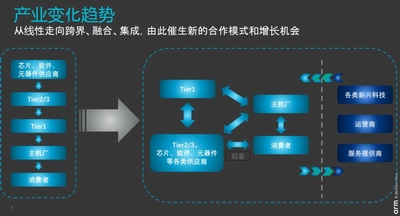
过去产业链之间呈自上而下的线性关系,随着汽车自动化、网联化、电气化的深入发展,产业链内部各级供应商和整车厂会有更多的横向交流。因此产业链会从线性走向跨界、融合、集成,由此催生新的合作模式和增长机会。
随着自动驾驶的程度越来越高,驾驶员以及乘客会逐渐的对汽车的智能座舱有更高的要求,因此汽车的车载信息娱乐系统(IVI)会逐步向智能座舱转型;自动驾驶方面,L1, L2级别的汽车已经量产,技术也在逐步提升,现阶段会朝着L3或L3+的方向发展;动力系统方面,新能源的大趋势是不会变的,所以传统发动机会朝着混动、纯电动或是其他能源驱动转变。上述转型会给汽车半导体行业的发展带来飞速增长,汽车内的软件代码量会急剧增长,同时技术进步会带来经济和社会效益。混合安全等级的系统:安全系统+非安全系统。若智能座舱相关控制器中要集成安全与非安全的应用软件,此时需要Hypervisor(虚拟机监视器),它可以将安全与非安全的应用以及分别对应的操作系统(如实时性操作系统,LINUX,Android)跑在同一个硬件上。各个公司正在抓紧时间做用于2021/2022年的L3+样机;真正的大规模部署自动驾驶控制器,该控制器需要具备:服务器的计算性能(算力强)、台式机的功率要求(功率高),以及笔记本电脑热特性(风冷或自然冷却,无需水冷)。
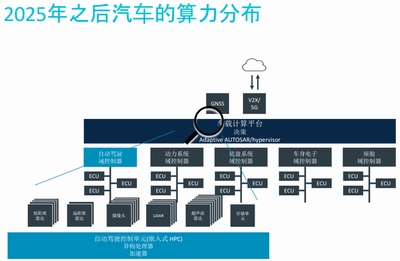
下图是某汽车2025年后自动驾驶的算力分布情况,它有2个计算平台来保证能够满足自动驾驶所需的算力从而达到高效驾驶,无需人工干预:一个是车载计算平台,可以做决策;另一个是自动驾驶域处理器。
自动驾驶汽车的生态系统:复杂又广泛
波音787的软件代码1400万行,而一辆L5的自动驾驶汽车大约有10亿+行代码。因此自动驾驶汽车的代码量非常非常多,也非常非常复杂,这么多的代码量也就意味着自动驾驶的生态也非常复杂,需要很多的角色。
最后一位分享嘉宾,来自汇业律师事务所的合伙人:史厚元律师,给我们带来了从法律角度来看,自动驾驶面临的挑战。无论从技术层面还是法律层面来界定,自动驾驶与无人驾驶都是有严格的区别。2017年12月,目前国内最早的北京市地方法规《北京市关于加快推进自动驾驶道路测试有关工作的指导意见》对自动驾驶车辆做了规定:测试车辆必须能够对自动驾驶功能和人工驾驶功能的随时切换。
2017年5月份,德国联邦议会通过了一项道路交通法案:允许“自动驾驶”,不允许“无人驾驶”。规定当自动驾驶系统启动之后,司机可以转移注意力,比如去读书或上网,但司机必须保持足够的警觉,以便在系统发出请求时恢复人工控制。
从全球范围内来看,1968年《维也纳道路交通公约》中有明确规定:但凡在道路上行驶的车辆中,必须要有驾驶员。
因此,从现有的法律法律上来看,允许自动驾驶,但是不允许无人驾驶。
《北京市关于加快推进自动驾驶道路测试有关工作的指导意见》自动驾驶功能是指自动驾驶车辆上,不需要测试驾驶员执行物理性驾驶操作的情况下,能够对车辆行驶任务进行指导与决策,并代替测试驾驶员操控行为使车辆完成安全行驶的功能。自动驾驶功能包括自动行驶功能、自动变速功能、自动刹车功能、自动监视周围环境功能、自动变道功能、自动转向功能、自动信号提醒功能、网联式自动驾驶辅助功能等。自动驾驶系统是指能在某一时段执行自动驾驶功能的 系统。机动车辆仅含以下机动车辅助类自动化系统不属于自动驾驶系统:主动安全辅助系统、电子盲点辅助系统、防撞系统、紧急制动系统、停车辅助系统、自适应巡航系统、车道保持辅助系统、车道偏离报警系统、交通堵塞排队援助系统等。自动驾驶涉及公共安全、社会规则甚至社会伦理等诸多方面。从技术突破到真正规模化运行,中间还有太多要解决的问题。而作为公共交通安全基本保障的相关法律,在新技术大潮中如何发挥规范指引作用,平衡新技术与公共安全的关系,是对立法者智慧的重要考验,一定程度上也是影响新技术及相关企业命运的重要因素。
最后,史律师从公众利益最为相关的事故责任及保险理赔二个维度对自动驾驶面临的法律挑战做了前瞻性的分析。
来源:交大汽车观察